产品别名 |
科尔摩根伺服驱动器,科尔摩根伺服系统,科尔摩根电机 |
面向地区 |
伺服电机转子转速受输入信号控制,并能快速反应,在自动控制系统中,用作执行元件,且具有机电时间常数小、线性度高、始动电压等特性,可把所收到的电信号转换成电动机轴上的角位移或角速度输出。
伺服系统按控制方式开分为开环、闭环和半闭环等类型。它的主要作用有:以小功率指令信号去控制大功率负载;在没有机械连接的情况下,由输入轴控制位于远处的输出轴,实现远距同步传动;使输出机械位移地跟踪电信号等。伺服系统初用于,如火炮的控制, 船舰、飞机的自动驾驶和导弹发射等,后来逐渐推广到国民经济的许多部门,如自动机床、无线跟踪控制等。
对伺服系统的基本要求有稳定性、精度和快速响应性。
稳定性好:作用在系统上的扰动消失后,系统能够恢复到原来的稳定状态下运行或者在输入指令信号作用下,系统能够达到新的稳定运行状态的能力,在给定输入或外界干扰作用下,能在短暂的调节过程后到达新的或者回复到原有平衡状态;
精度高:伺服系统的精度是指输出量能跟随输入量的程度。作为精密加工的数控机床,要求的定位精度或轮廓加工精度通常都比较高,允许的偏差一般都在 0.01~0.00lmm之间;
快速响应性好:有两方面含义,一是指动态响应过程中,输出量随输入指令信号变化的迅速程度,二是指动态响应过程结束的迅速程度。快速响应性是伺服系统动态品质的标志之一,即要求跟踪指令信号的响应要快,一方面要求过渡过程时间短,一般在200ms以内,甚至小于几十毫秒;另一方面,为满足超调要求,要求过渡过程的陡,即上升率要大。
节能高:由于伺服系统的快速相应,注塑机能够根据自身的需要对供给进行快速的调整,能够有效提高注塑机的电能的利用率,从而达到节能。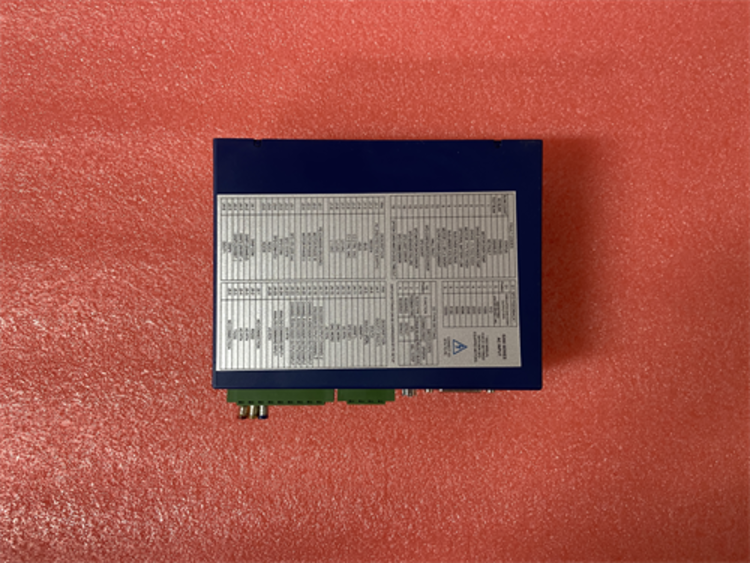
控制系统是伺服电子变压器的另一个重要组成部分,它负责监测和控制输入线圈中的电流或电压。控制系统通常由一个或多个传感器、控制器和执行器组成。传感器用于检测输入线圈中的电流或电压,并将这些信息传输给控制器。控制器根据预设的参数和反馈信号,计算出需要调整的电流或电压值,并将其发送给执行器。执行器负责将控制器的指令转化为实际的电流或电压变化,从而改变输入线圈中的电流或电压。
通过这种工作原理,伺服电子变压器可以实现对电力的控制和调节。它可以用于各种应用场合,如电力系统、工业自动化、电子设备等。与传统的机械式变压器相比,伺服电子变压器具有更高的效率、更小的体积和更灵活的控制能力。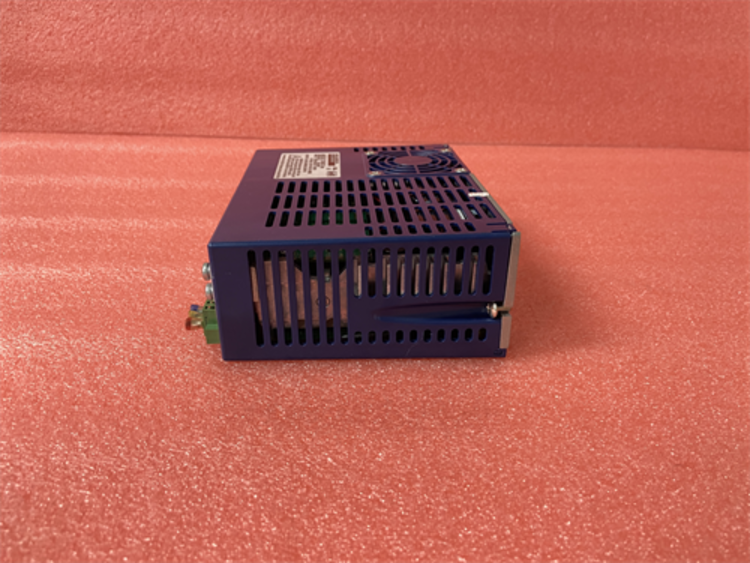
常用的方法便是PLC发送脉冲到伺服电机驱动器,伺服电机驱动器再操控电机旋转。伺服驱动器除了供电的电源线外,一般至少还要接三条线缆。条是连接伺服电机的电缆线。第二条是伺服驱动器的输入输出信号线,一般称为CN1接口,主要和PLC,感应器等连接,包括PLC的脉冲输出口。第三条是编码器连接线,伺服电机上都装有编码器的。用来检测电机的实践旋转视点。细分便是伺服电机旋转一圈需求的脉冲数,一般再20万以内。伺服电机旋转的小视点能够准确到一个脉冲。一般伺服都有三种操控方法:方位操控方法、转矩操控方法、速度操控方法。
伺服驱动器具有完备的过流、过载、过压等保护功能,可以实现对伺服电机的保护,不考虑伺服驱动器逆变侧谐波对伺服电机影响的情况下。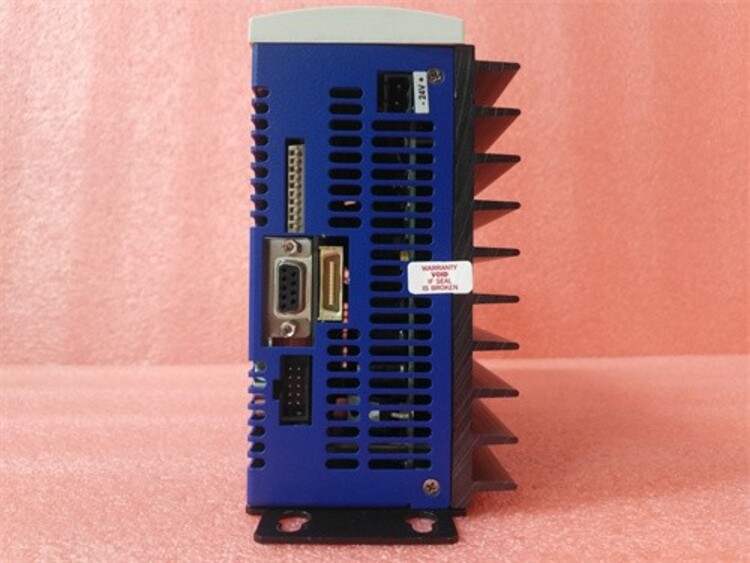
伺服驱动器是现代运动控制的重要组成部分,被广泛应用于工业机器人及数控加工中心等自动化设备中。尤其是应用于控制交流永磁同步电机的伺服驱动器已经成为国内外研究热点。当前交流伺服驱动器设计中普遍采用基于矢量控制的电流、速度、位置3闭环控制算法。该算法中速度闭环设计合理与否,对于整个伺服控制系统,特别是速度控制性能的发挥起到关键作用 。
应用领域
伺服驱动器广泛应用于各个领域,包括工业自动化、机械加工、印刷包装、医疗设备、机器人技术等。在工业自动化中,伺服驱动器可用于控制机械臂、输送带、自动装配线等设备,实现和率的生产流程。在机器人技术领域,伺服驱动器能够控制机器人的运动,使其能够完成复杂的任务。